





行业痛点:传统扫描的“精度陷阱”
为什么越扫越歪?在大空间、弱特征场景里,传统的GPS或单一激光常常迷失方向。

1cm的真实门槛:验收生死线
1cm 不是“听起来很小”,它决定了模型能不能用于验收与落地。

我们怎么交付精度
把“精度”变成可量化的闭环,拒绝“凭感觉”
核心理念:建立可追溯的质量闭环
不依赖人工经验,用数据和规范流程确保交付的每一平米都符合 1cm 精度标准。

通过“过程控制 → 量化验收 → 定位返工”形成完整闭环,确保交付模型达到1cm要求。
核心技术框架:不依赖GPS的SLAM体系
如何做到“走一圈回来还能对上”?
核心理念:前端让误差长得慢,后端把误差拉回一致。
这套不依赖 GPS 的纯视觉与激光融合体系,是我们实现全域 1cm 极高精度的基石。

前端链路:怎么保证每一帧点云都准?
把“脏点云”变成“可用点云”,核心就三步:去波浪、定大概、抠细节

关键工程环节(最容易被忽略)

三条主线:找病根 / 控病情 / 除病根
你关心的“逐帧累积误差”,放到一条清晰主线里讲透

核心观点:单帧只能“尽量准”(控病情),全局必须靠“回环 + 优化”把误差拉回(除病根)。

全局纠偏:回环检测 + 图优化 打开 3D 原理演示
前端只能让误差长得慢,真正把整段路线“拉回一致”,靠的是回环检测和后端图优化。

后端在做什么
把整条扫描路线看成一张约束网络,不再只盯着“上一帧对下一帧”,而是把前后多次观测一起纳入统一优化。

客户听得懂的说法
当系统发现“这里以前来过”,就会用这个强约束把一路累积下来的漂移整体拉回来,避免最后头尾对不上。
核心结论:全局纠偏不是修一帧,而是把整段路线同时校正,让模型从“局部像对上”变成“全局真的对上”。
初始对准:决定模型第一印象的几秒钟

两个关键环节:IMU去畸变 + LiDAR粗定位
把 3 页技术展开压成 1 页,客户只需要记住“先拉直,再靠拢”

LiDAR 粗定位:先把“大轮廓”对上

客户听得懂的说法
先不用抠细节,而是先拿平地、墙角、立柱这些稳定几何做粗配准,把当前位置和上一帧环境快速靠拢,避免后面一开始就算飞。
这一段给客户留下的核心印象应该是:前端不是一个算法,而是一套“先校正、再定位、再精修”的稳健流程。
把多次扫描拼成完整大图(ICP拼接) 打开 3D 动画演示


重复扫描精度如何稳定在1cm:三大支柱

阶段性成果:BIM/IFC 数据结构化提取
将无序的模型数据转化为带有语义的建筑构件,实现真正的数字化解析。

阶段性成果:点云与 BIM 误差三维色阶渲染

阶段性成果:全景三维点云与测量工具
为交付成果提供所见即所得的 Web 端交互与测量能力。
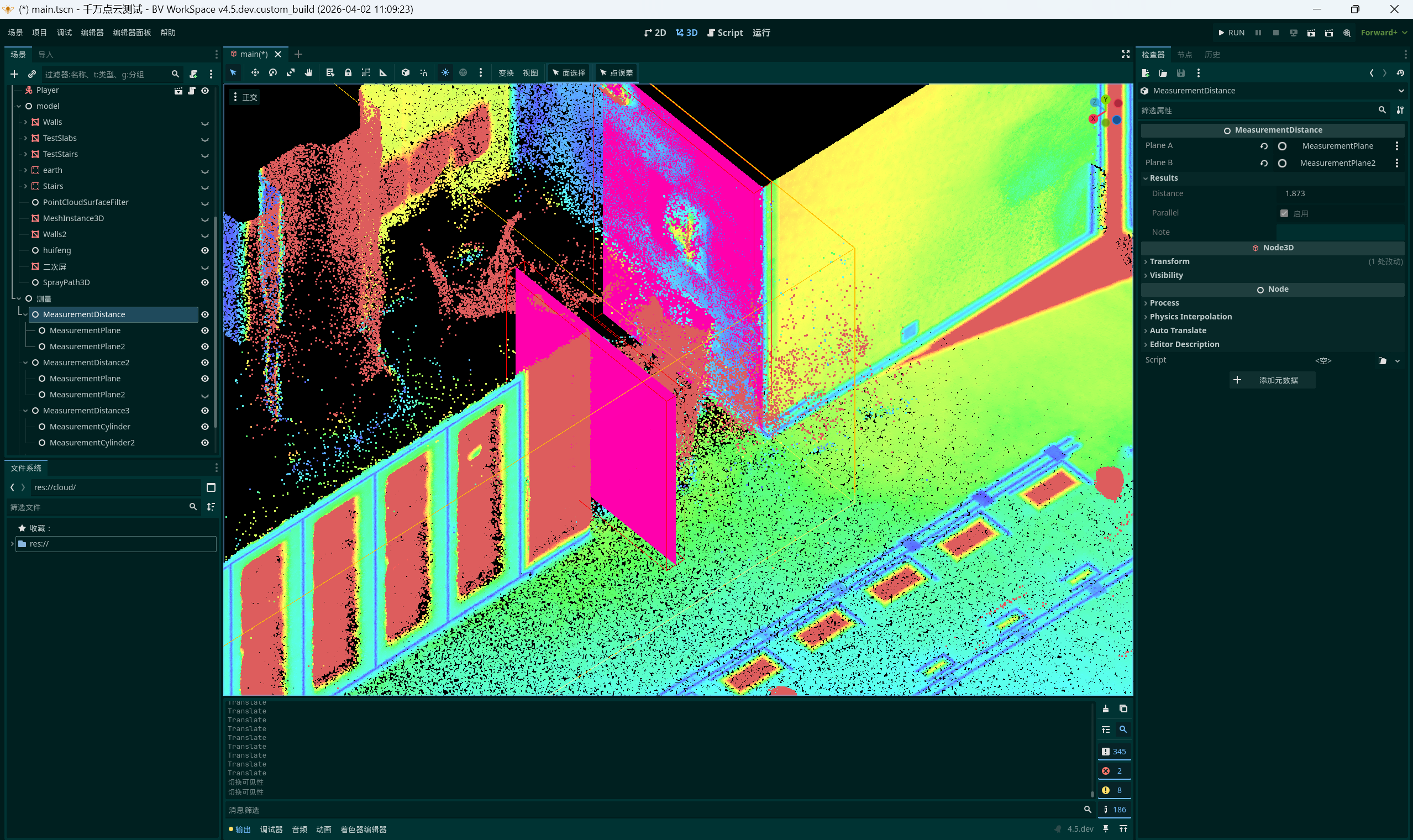
图示:Web 端高保真点云浏览,支持空间任意两点的精准测距、剖面分析等实测实量工具。
应用延伸:设计协同与隐蔽工程
从表面到内部,打破设计与施工的单向信息流。
🏗️ 施工与设计深度协同
- 伴随式核对:将现场扫描数据直接与 BIM 叠合,第一时间纠正施工偏差。
- 动态反馈:建造参数发生调整时,可通过扫描结果同步修改图纸,确保“图实一致”。
🔍 隐蔽工程与管线分析
- 复杂管线比对:自动识别机房管线走向、管径,精准发现与 BIM 的冲突点。
- 隐蔽结构溯源:在混凝土浇筑前扫描,实现钢筋间距智能测量,确保数据可验收。


技术演进:当前局限与下一代产品
不回避当前挑战,用明确的进化路线攻克工程难题。


THANKS
感谢聆听 · 欢迎交流

扫码添加微信
软硬件协同团队 · 设备端与APP端快速迭代
SLAM算法 / 多传感器标定 / 3DGS渲染 同步推进
SLAM算法 / 多传感器标定 / 3DGS渲染 同步推进